
안녕하세요? 커피러브입니다.
이번에 학교 로봇 동아리에서 Autodesk Fusion을 사용한 기계 팔 Manipulator 3D modeling 및 제어 스터디가 열려서, 참가하며 수행한 내용을 기록해보고자 합니다.

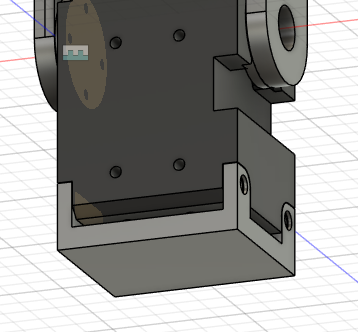
우선 윗판부터 설계하기로 했습니다. 아래판은 난이도가 꽤 있네요...

일단, 양쪽 지지하는 벽 두께가 1.8mm는 너무 얇다 생각해 5mm로 올렸습니다.

확실히 좀 더 견고해진 모습입니다.
이제 위쪽으로 팔을 올릴 건데,
가로 28.5, 세로 20.5이 되도록 올릴 겁니다.
정사각형으로 하고 싶지만... 아직 초보라 어렵네요 ㅠ
로봇팔 높이는, 하중범위 106-35 = 71에서,
대략 대각선이 되도록 끝을 높일 거라,
50 대 20으로 하겠습니다.

하중범위 106 이내에 들어오게 설계합니다.

이제 위에 모터를 돌려서 얹을 거기 때문에, 모터 길이만큼 뻗어줄 겁니다.

일단 안에 뼈를 넣어서 만들어 줬습니다.
그리고 위에 붙일 그 접합부는, 아래 꺼를 떼오면 돼서,
우선 아래 받침대를 먼저 완성할게요.
나머지는 다음주에 이어서...
'Autonomous & Robotics > Manipulator 스터디' 카테고리의 다른 글
| [Manipulator 스터디] week3 - 매니퓰레이터 모델링 [1] (0) | 2025.11.26 |
|---|---|
| [Manipulator 스터디] week2 - Fusion 기초 사용법 공부 및 실습 (0) | 2025.11.26 |
| [Manipulator 스터디] week1 - Fusion 사용을 위한 환경설정 (0) | 2025.11.26 |


